
|
|
|
|
Etude/Réalisation |
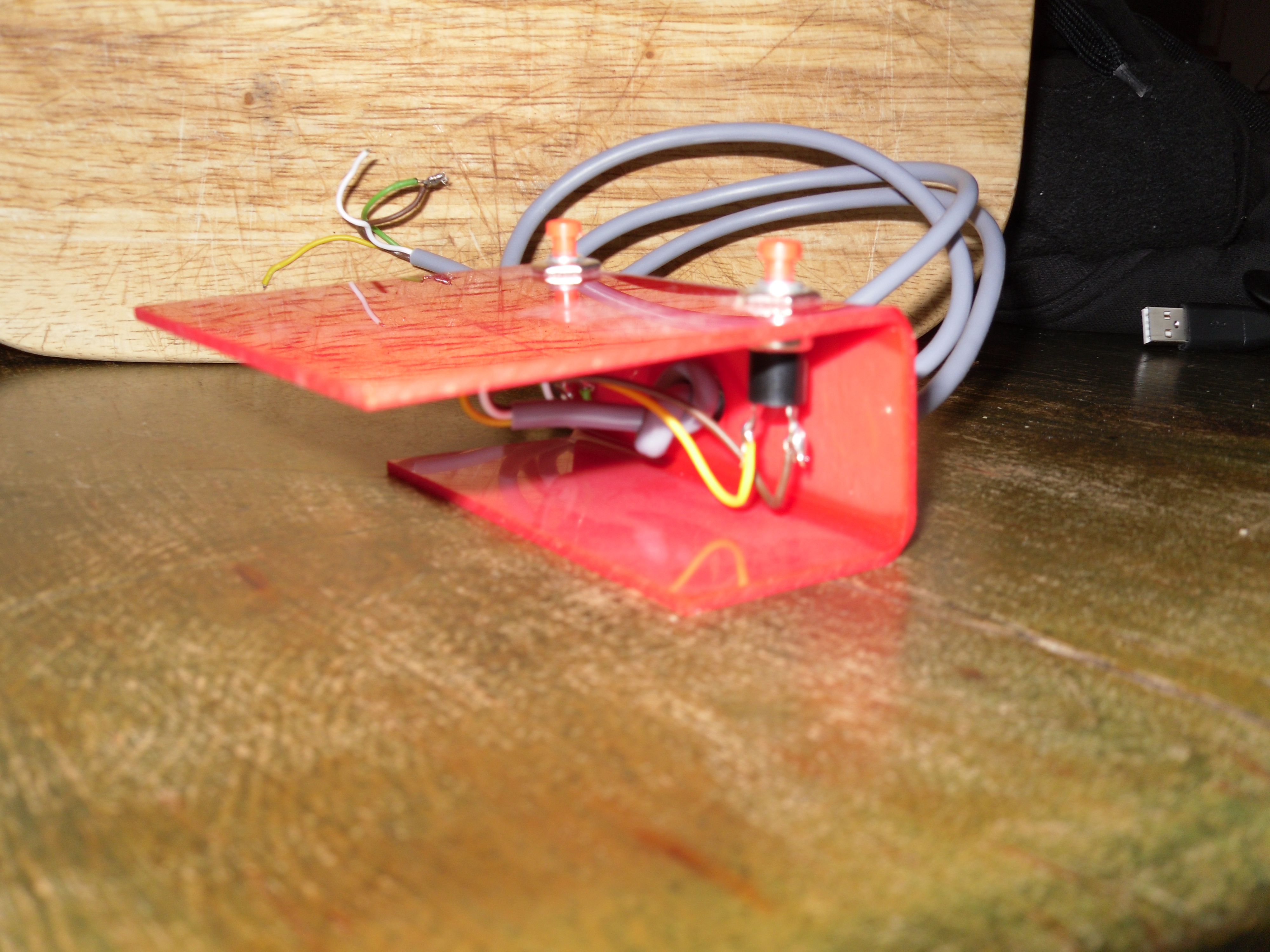
Fonctions principales et fonctions de service (bon la il reste du travail d'analyse): FP.1 - FAIRE PLAISIR ŕ l'équipe de techno. FT.1 - SUPPORTER la motorisation, la commande et les futurs capteurs I.R suiveur de ligne. FT.2 - GUIDER (ceci est en fait solutionné par la fonction propulser) FC.1 - bla..bla CdC-CONTRAINTES et OBLIGATIONS: On disposait d'un proto simple, ŕ commande manuelle. La fonction 'diriger' est assurée par le différentiel de rotation des moteurs de propulsion (idem char). SITUATION DEPART: ex nihilo CdC-CONTRAINTES et OBLIGATIONS: On se fixe un objectif de 15 euros maxi, (+10 euros électronique+ piles ou accus). et une CAPACITE DIVERSIFICATION/REUTILISATION:
Non démontable plus de 20 fois (visserie dans la matičre autoperforante). MODULARITE: pouvoir changer le support de piles+les cartes (solution avec 2 plots + 1vis, glissiere dans les ailerons etc...): 1er retour d'expérience: LE ROBOT FONCTIONNE et ATTEIND 2 objectifs: + susciter la curiosité et + illustrer les chaines info+NRJ.
pb0..... Le robot męme tq constuit plait et pour se l'approprier, les élčves ont tendance ŕ jouer avec! -> sol:
faire une étude sérieuse de méca pour le renforcer (ou le confiner, le
rendre difficilement accessible)!. pb1..... Le robot initial, avec sa roue avant folle, est trop penché-cabré vers l'arričre: celŕ induit un fort couple ŕ vaincre au démarrage quand la roue avant s'oriente de côté.! -> sol1: mise en place d'un col de cygne (SOLUTION RETENUE Sept 2011). -> sol2: on change la roue et on place une spatule (simple feuillard de PVC plié (attention non testé)). pb2..... motricité de l'arričre+les élastiques qui empęchent le glissement: il y a risque de blocage du moteur (l' électronique devra en tenir compte pour dimensionner le courant max): TESTE AVEC le 293, PAS DE PB ! -> sol: mise en place des piles au droit des roues arričres et sans élasto-bande de roulement (ON ASSURE AINSI UN GLISSEMENT) sol4: solution électronique ou le darlignton devra encaisser les ampčres ( partiellement testé sur BERNARDII). pb3..... il est moche et ne dispose pas de carrosserie ou de point de fixation pour une carrosserie pour satisfaire tous les élčves -> sol5:
coller sctoch double face sur la tranche (TESTE: OK pour supporter
carton) du chassis, ajouter corniere pliage PVC.... (ŕ voir) pb4..... AUTONOMIE non testée (environ 40 mn) et budget des accus ŕ faire. (piles trop chčres) |

{kind=link}
{kind=link}
{kind=link}