
|
|
|
|
infos |
Les pbs d'intégration mécanique et thermique
sont de différentes natures:
+ maintien et caractčre amovible du boitier:solution (velcros possible) ou double face ici retenue (cout!) + dimensions réduites du boitier et place laissée aux connecteurs (une connectique 'bornier externe' serait souhaitable). + Maintien-réglage plateforme avant pouvant recevoir les capteurs comme suiveur de ligne. (le col de cygne). + accessibilité au changement de piles. + usage par des élčves: identification visuelle claire des fonctions (sticker?) et robustesse ŕ prévoir. . > Le MODELE 3D (vue de coté) du Robot N1 'Bernard1' est maintenant publié sous Google Sketchup, accessible par tous. > En voir une photo 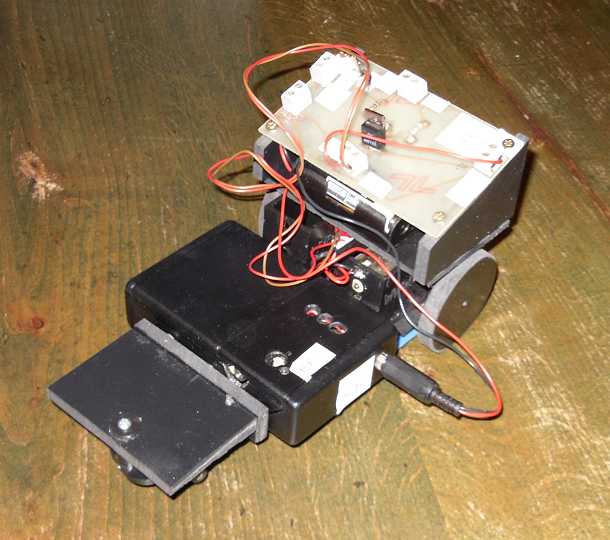 . .> Si pb de téléchargement, il suffit de lancer Google et d'importer le modčle intitulé 'ROBOT PICAXE': utilisez les calques pour voir les fonctions. > Beaucoup d'études mécaniques pourraient ętre faites ŕ partir de cette plateforme!!!
|
