mBot: Sciences et Technologie Collège

|
Cette
note détaille l'utilisation de l'environnement de simulation v-rep sur un PC local ou sur un réseau collège.
28-mai-2018 / JC HOLSTEIN /v 1.0
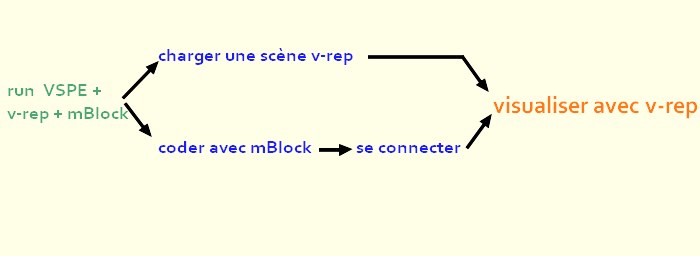
1.VSPE
Cet 'émulateur de port virtuel 'créera un tuyau' entre mBlock et v-rep. ordres/commandes de mBlock ----> v-rep mesures des capteurs dans v-rep ---> mBlock. Ce logiciel remplace (on dit émule) le câble USB ou la clef USB 'wifi" et fait croire à une 'vraie' présence d'un 'vrai 'robot physique CREATION du 'tuyau' port virtuel pour visualiser les mouvements robot <A>
Démarrer Virtual
Serial Ports Emulator en cliquant sur son icone
 .
 ==> VSPE est lancé et dans la fenêtre, réduire la fenêtre avec le petit symbole '-'. 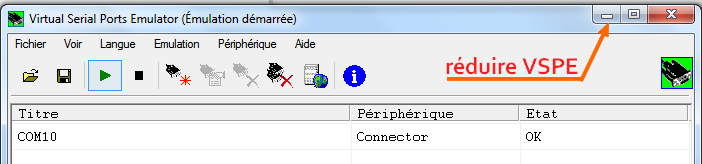 L'état 'prêt' indique que le "tuyau' est dans l'attente de transfert d'ordres soit par application soit par start.  L'état 'OK', différent de 'prêt', indique qu' il y a eu transfert dans le tuyau. L'affichage "Intialisation... OK" apparait en vert dans la barre des messages et l'état apparaîtra comme OK lorsque VSPE aura 'accroché' le port 'COM10'. nota:: on appelle ça un périphérique virtuel (qui peut être utilisé par 2 programmes (v-rep+mBlock) et nous pouvons observer réellement ce qui sort de mBlocks. VSPE peut 'sniffer' cette liaison série virutelle. nota: si VSPE est déjà lancé, un message d'information qui peut faire croire à une erreur apparaîtra 'l'application est déjà lancée' (Application already started) conseil: si mBlock est déjà lancé, pensez à déconnecter mBlock, (onglet 'connect'/port série et décochez). Mais il est préférable de démarrer mBlock après VSPE. Si l'état est à 'n/a' (non accessible) voir 'error', c'est qu'il faut changer de port et/ou relancer les applications car l'ordre des 'start' est important.
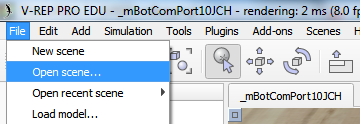
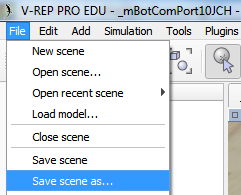
3. utilisation de mBlock pour envoyer des commandes à v-rep
_______________________Simuler enfin!_______________________ -C- Connecter le port COM10. 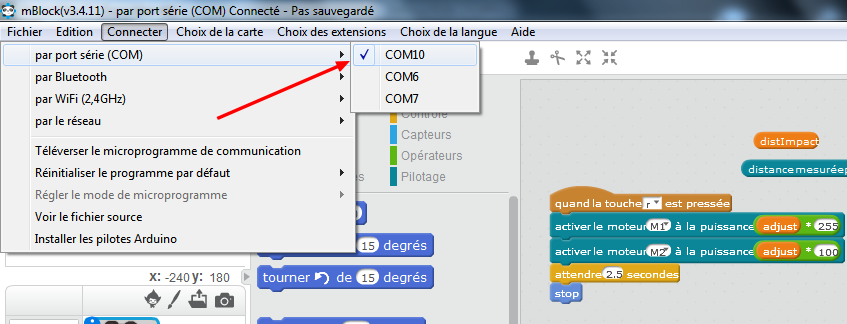 nota: on peut se reconnecter après le lancement de VSPE mais il est + judicieux de lancer d'abord VSPE. => Ces actions créent un lien entre le code de mBlock et l'environnement de simulation qui reproduira alors toutes les actions moteurs, LED, afficheur à segments etc... -D- Pour simplifier, RESPECTEZ bien l'ordre suivant: Démarrer la simulation sur V-REP  lancer le code dans mBlock (drapeau start  ou action clavier). ou action clavier). => Le modéle 3D (trés fidèle cf sketchUp 3D/warehouse) du robot mBot + exécute les ordres, + le modèle est pilotable par le clavier (autorisant ainsi facilement la mise au point du programme notamment pour répondre à la problèmatique du réglage quel mouvement? /quelle tempo? puis, quel temps d'attente, puis quel autre mvt suivant etc...) + le modèle entre en collision avec vos propres modèle 3D xxx exportés de sketchUp au format "stl" (File/import/Mesh = le nom de votre xxx.stl) + le modèle simule des capteurs et actionneurs, à l'exception des sons (et peut être d'autres commandes, s'informer sur le github du projet) ....suite... __________________ cas du réseau collège_______________________ Pour l'instant il n'y a pas d'automatisation et VSPE doit être lancé en début de séance. _______________________(<>)_______________________ réservé Avec mBlock v3.4.11, mais
surtout v4 et v5 sous windows 7, en mode de base 'carte
mBot', il peut y avoir ( mais une
seule fois à
l'installation), un PROBLEME
d' ASSOCIATION du PORT
VIRTUEL avec la liste
des PORTS UTILISABLES de mBlock.
mBlock v3.4.11 est à préférer, car la liste apparaissant dans 'connect' est mieux mise à jour. (constat à mai 2018, v4 et v5 semblent poser problème). (il faudra peut-être PROCEDER A UN NETTOYAGE) ..... pour voir la procédure, allez voir la dernière note d'installation _________________ fin_______________________
|
|||


 :
: