mBot: Sciences et Technologie Collège

|
Cette
note, qui est un second jet, est destinée à celles et ceux qui
souhaitent installer leur propre environnement de simulation v-rep en local ou sur un réseau collège.
Elle n'a de sens que pour la 1ere installation et peut contenir des erreurs. Il n'y a peu de travail de mise en page, la forme est immédiate et non travaillée!! Merci à Jean-Christophe Jouveaux, notre ATI, pour son
aide précieuse. installation v-rep+VSPE+(mBlock) -->
paramétrage v-rep + VSPE --> run VSPE-> mBlock -> v-rep 26-mai-2018 / JC HOLSTEIN /v 1.0
1.
Setup http://coppeliarobotics.com/files/V-REP_PRO_EDU_V3_5_0_Setup.exe le symbole '==>' signifiera 'le résultat de votre action' => Puis l'installer (rien à configurer, juste faire next next next...) !aide => Puis l'installer (de même rien à configurer) !aide Pour la version 64 bits, l'éditeur rappelle que nous pouvons l'acheter dans le cadre d'une utilisation 'commerciale' github: https://github.com/NenadZG/mBot-simulation (Cliquez sur "Clone or download") ==> Les 6 fichiers sont téléchargés dans le zip "mBot-simulation-master.zip" nota: il sera nécessaire de mettre à jour le script 'codant le mBot' pour choisir le port COM10 (#) dans le logiciel v-rep !POURQUOI DEVOIR MODIFIER ce paramètre (#) ? > Car LE SCRIPT DE BASE de la scène de base INDIQUE d'UTILISER le PORT COM2, le risque étant que celui est peut-être déjà réservé. > Ce paramètre est très important car il est utilisé pour 'passer' les commandes de mBlock à l'environnement virtuel v-rep. < modifier le script de scène> Démarrer v-rep et ouvrir la scène (*) "/V-REP scenes/Demo room 1.ttt" avec file:open scene nota: vous pouvez utiliser la scène 'mBotPortCom10JCH.tttt' qui est une scène simplifiée pour mes élèves, prévue pour le port COM10 ==> un onglet/arborescence : new scene "Scene hierarchy" Si vous voyez juste 'new scene', c'est que vous n'avez pas chargé une scéne 'mBot' et il faut alors recommencer et CHARGER LA SCENE (*) avec file:open scene _______WARNING-synthèse _______ Cette scene '*) 'mBot ready' n'existe pas à la base dans v-rep, et il faut la télécharger (cf 2.1). Vous avez bien 2 téléchargements à faire! contrôle pour vérifier ==> pour vérifier, ds v-rep, au dessus de scene hierarchy, vous devez avoir maintenant le nom de la scène en cours "Demo room 1"  => On voit tous les composants du mBot ainsi que des 'sous hierarchies' symbolisées par les '+' + aller dans la branche "mBot", cliquez sur l'onglet '+' pour déplier + puis double-cliquez sur "mBotScript" situé à la 10e ligne (désolé !!)   warning! il y a trois petites icones qui correspondent à 3 zones de clic: (une icône avant le texte 'mBotScript' en gris et 2 icônes après) La 2eme icône (miniature look 'fichier' ressemblant à une feuille pliée) est le script: on n'y touche pas! + Il faut sélectionner la 3e icone (**) par un dble-cliqué, celle qui ressemble à des curseurs de réglages de console de studio d'enregistrement. 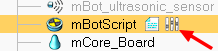 ==> liste de 20 paramètres va apparaître. Le dernier est le mode debug que l'on peut passer à 'true' (très instructif) ==> Le second est l'identification du comPort (par défaut COM2). Ce paramètre s'appelle Com port name, est modifiable à souhait et c'est là que vous devez indiquer votre valeur de portCom libre, dans le champ 'Parameter proporties' _______ATTENTION _______> Certains ports ne sont pas sélectionnables par VSPE, ou ne figurent pas dans la liste des ports disponibles de mBlock (car déjà ouverts, utilisés par ailleurs etc..?). Ma 1er installation (sur windows7) fût 'à tâton', mais je rappelle....,pas de pb sur W10 (tablette le novo ou autre PC Asus), RAS sur nos PC W8. voir en fin de page (<>) une tentative d'explication:
3.VSPE d'autres solutions doivent exister Cet 'émulateur de port virtuel 'fera croire' à mBlock à une 'vraie' présence d'un 'vrai 'robot physique Il s'agit d'une solution 'connector' reliant 2 applications partageant un même port virtuel (de base, W n'autorise pas une double connection sur un même port) _______WARNING _______ EFFECTUER D ABORD cette AFFECTATION avec mBlock FERME AU PREALABLE (sinon le relancer) ++ Device/Create (ou périphérique/créer si version en français), choisir -->connector et Suivant . ==> VSPE vous demande alors de choisir le porCom à émuler: 1ère affectation: Il faudra choisir un portCOM en adéquation ABSENT de la liste de mBlock (cette liste apparaît en choisissant 'connecter' dans mBlock). réutilisation après 1ère affectation: Il faudra choisir un portCOM PRESENT dans la liste de mBlock, mais non connecté par mBlock, sinon VSPE refusera l'affectation (n/a). réutilisation après 1ère affectation: pensez ainsi à bien déconnecter mBlock, (onglet 'connect' et décochez) ou mieux, à démarrer mBlock après VSPE. Cliquez (ici pb) s'il y a pb!  L'affichage dans la barre des messages "Intialisation... OK" apparait en vert et l'état est mis à OK lorsque VSPE a accroché un portCOM. L'état 'prêt', différent de 'OK" indique que l"émulation est possible et que VSPE est dans l'attente du start.  Si l'état est à 'n/a' (non accessible) voire'error', c'est qu'il faut changer de port et/ou relancer les applications car l'ordre des 'start' est important. En cas de pb!: Si v-rep ne répond pas aux commandes de mBlock reprendre la procédure suivante: => La branche apparait => Une fenêtre "Script parameters" s'ouvre _______________________Simuler enfin!_______________________ nota: on peut se reconnecter après le lancement de VSPE mais il est + judicieux de lancer d'abord VSPE. => Ces actions créent un lien entre le code de mBlock et l'environnement de simulation qui reproduira alors toutes les actions moteurs, LED, afficheur à segments etc... nota: on appelle ça un périphérique virtuel (qui peut être utilisé par 2 programmes (v-rep+mBlock) et nous pouvons observer la nature de l'échange dans VSPE qui peut 'sniffer' cette liaison série virutelle. Il est ainsi possible de MONTRER aux élèves ce qu'envoit mBlock à v-rep: c'est le protocole Orion qui, pour mBot, commence toujours par FF 55. Il est presque facile de reconnaître la commande envoyée: un start ou un stop (càd le drapeau vert) est toujours la même trame $FF $55 $0D $0A 4.2. Démarrer la simulation sur V-REP  et lancer
le code dans mBlock (drapeau start ou action clavier). et lancer
le code dans mBlock (drapeau start ou action clavier). => Le modéle 3D (trés fidèle cf sketchUp 3D/warehouse) du robot mBot + exécute les ordres, + est pilotable par le clavier (autorisant ainsi facilement la mise au point du programme notamment pour répondre à la problèmatique du réglage quel mouvement? /quelle tempo? puis, quel temps d'attente, puis quel autre mvt suivant etc...) + simule des capteurs et actionneurs, à l'exception des sons (et peut être d'autres commandes, s'informer sur le github du projet) ....suite... __________________ cas du réseau collège_______________________ Nous avons créé un fichier de config VSPE (faire dans VSPE: 'fichier/enregistrer sous') qui force la connection sur COM10. Pour l'instant il n'y a pas d'automatisation et les élèves doivent le lancer en début de séance. _______________________(<>)_______________________ La difficulté est de trouver un numéro de portCOM qui satisfasse et mBlock, et Windows et VSPE! Il n'y a aucune difficulté quant à v-rep. Avec mBlock v3.4.11, mais
surtout v4 et v5 sous windows 7, en mode de base 'carte
mBot', il peut y avoir ( mais une
seule fois à
l'installation), un PROBLEME
d' ASSOCIATION du PORT
VIRTUEL avec la listte
des PORTS UTILISABLES de mBlock.
mBlock v3.4.11 est à préférer, car la liste apparaissant dans 'connect' est mieux mise à jour. (constat à mai 2018, v4 et v5 semblent poser problème). Il n'y a plus de problème lorsqu'on utilise le mode Arduino, qui lui, verra bien le port nouvellement virtualisé (il n'est pas réellement créé) par VSPE grâce à sa console: il semble bien que ce soit un bug de mBlock dans le mode natif 'mBot'. Les lycées, qui utilisent le mode Arduino, ne devraient pas être impactés par ce pb. Je n'ai pas eu de pb sous W8 ni sous W10 même avec la tablette lenovo, mais ces machines étaient relativement peu connectées/déconnectées et reconnectées. (il faudra peut-être PROCEDER A UN NETTOYAGE) ..... pour voir la procédure, allez voir l'ancienne note d'installation _________________ fin_______________________
|


 :
: